

经过持续的技术积累和迭代,该方案在升级中变得更加强大、易用,部署也更加简单。摒弃繁琐的操作,企业可以轻松实现自动化生产,提升生产效率,降低人工成本。海康机器人3D视觉引导拆码垛方案,以技术升级为企业开启自动化生产新纪元。
方案升级
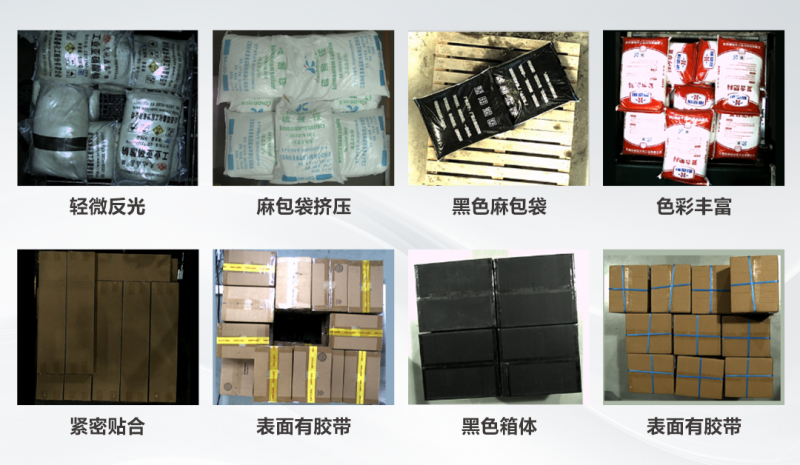
01 AI识别能力升级
识别能力超强
基于超过1000种场景和百万级数据类型的积累,超级AI模型具备极强的识别能力。无论是麻包袋、纸箱还是包裹,都能轻松识别。同时,它还能灵活适应物料变形、垛型松散等特殊情况。
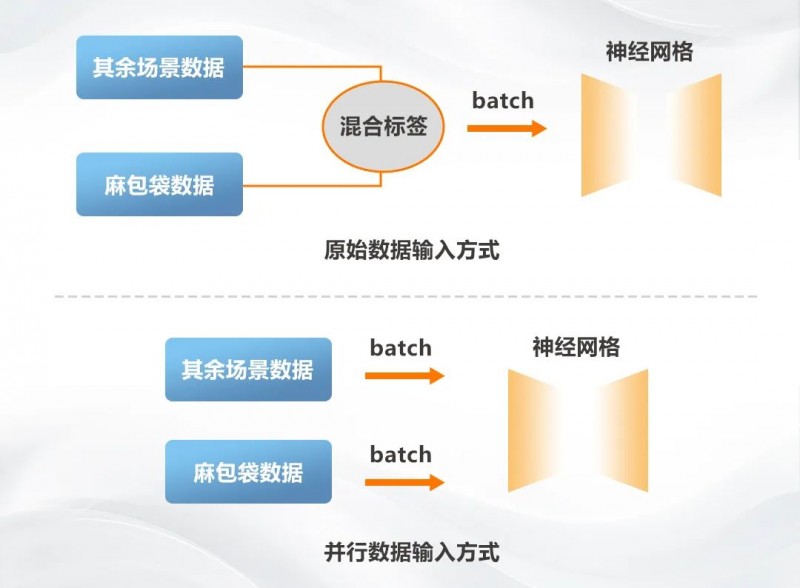
模型精简,快速部署
为了快速解决新场景下数据少的难题,通过模型增强、均衡训练等方法,泛化AI识别能力,实现快速部署。
02 环境适应能力升级
系统根据现场环境中的不同光照变化,自动调整RGB图曝光参数,快速适应环境,提高图像采集的稳定性和识别准确率。

03 拆垛功能升级
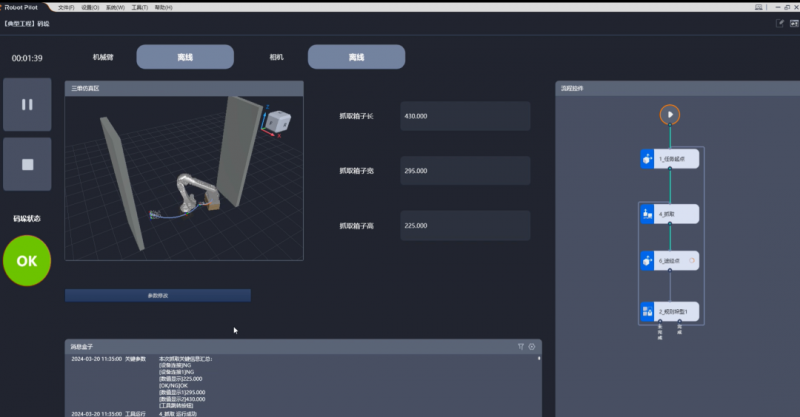
RP机器人视觉引导平台可以提供多种抓取顺序规则,通过拖拽式流程搭建和简单的参数配置,实现偏置抓取、对中抓取、一拍多抓、一抓多箱、智能端拾器抓取IO分配等多种抓取方式的应用,满足不同场景下对于抓取效率和生产柔性的个性化需求。

04 码垛功能升级
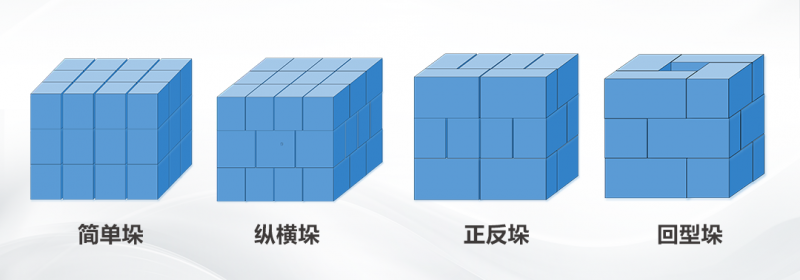
支持多种预设垛型
为满足不同场景下多样化的垛型需求,RP机器人视觉引导平台中支持自动生成垛型,同时支持垛型编辑器,多种垛型可供选择。
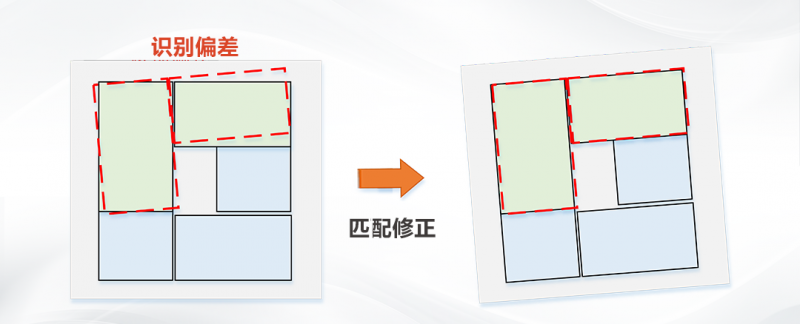
支持视觉续码+垛型栈板修正
面对产线上出现的异常断电等情况,系统中支持视觉续码,快速恢复生产状态。通过对已码包裹位姿与预设的垛型的匹配,确认当前状态并引导准确续码。同时垛型匹配时会将视觉识别到的偏差进行分析,修正垛型栈板,保障现场柔性生产。
05 拆码垛路径规划能力升级
自适应拆码垛路径规划。内嵌精准的碰撞检测方法,面对常规场景物体、复杂结构的端拾器、场景点云等不同情况,能够规避潜在的碰撞风险。
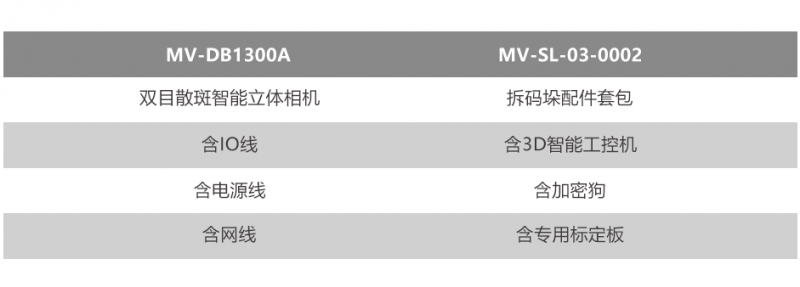
推荐配单
案例展式






