随着工业智能化需求日益增多,工艺复杂程度不断提升,企业对于自动化设备柔性化的需求也更加迫切,相比于AGV/AMR、协作机器人、机器视觉的单一功能,集合了三者特性的复合移动机器人显然更具柔性化的特性,且机器人随着与实际应用需求结合的日益深入,复合机器人可以实现不断迭代进化,复合出更多的应用可能,复合机器人是目前最接近未来人形机器人的工业机器人,在工业领域的应用场景非常多样,如喷涂、码垛、巡检、巡视、安防等众多领域。
根据CMR产业联盟数据,新战略移动机器人产业研究所统计, 2022年度中国市场新增复合移动机器人1150台,从2018年的120台到2022超千台,近年来复合机器人落地应用逐渐增多。
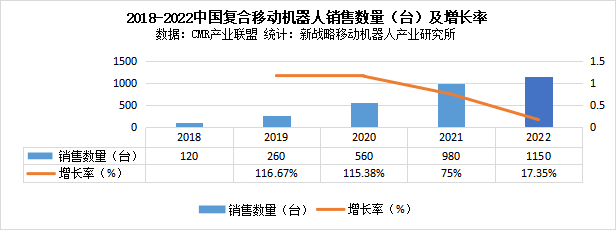
图表:2018-2022中国复合移动机器人销售数量(台)及增长率
但从技术难度上来讲,复合型机器人主要由 AMR、机械臂、视觉相机、末端执行器几部分构成,业内常见的复合型机器人是集成商买来采购不同的产品,进行组装和二次开发。这就导致了首先机器人的结构较为复杂,由于各个子单位的控制器不同,其内部通讯协议等完全不同,集成商的二次开发较为复杂,导致复合机器人的成本增高,让众多希望使用复合机器人的客户望而却步,目前,市面上最常见的是复合型机器是协作机器人+AMR,而翼菲科技首发的SCARA+AMR复合型机器人则解决了该类型机器人最大的痛点,其售价比协作复合机器人降低50%,设备交付时间降低60%。

翼菲科技是国家级专精特新“小巨人”企业,公司拥有从手臂机器人到AGV等多品类机器人及核心零部件。自研载翼系列AGV机器人现已拥有Camel-600潜伏式移动机器人、Camel-1000潜伏式移动机器人、D15-120小金刚托盘搬运叉车移动机器人、F15-4500搬运堆垛移动机器人、F15S-2000紧凑型搬运堆垛移动机器人等多种机型,基于自研多传感器融合导航算法及自研2D、3D视觉引导技术全面助力自动化高效搬运。
作为国内复合机器人品类最齐全的厂商,全球首发scara复合移动机器人并拥有协作、工业多规格六轴复合机器人产品,成为3C,医疗,食品,药品,面板及泛半导体等轻工行业重要的物流机器人供应商,拥有从产线,包装,物流到仓库管理等全场景的集成能力。
翼菲自主研发的AGV控制器,可以支持二维码导航、激光导航及传感器融合导航方式的应用,兼顾高柔性及高精度的导航定位需求;对于多机协同调度运行的应用,部署翼菲自主研发的AntRCS智能调度系统,来完成一些复杂流程和工艺,自主研发的机器人调度系统,负责移动机器人的任务分配、调度及运行维护。AntRCS采用人工智能调度算法和传统调度算法结合,具备一定自主学习能力。同时针对特定的应用场景,制定专业的调度策略包,解决传统调度软件调度策略单一、专用性不足的问题。用户可以根据不同的调度场景使用不同的调度策略包,实现最优的任务分配、多机器人路径规划及机器人交通管制,让机器人集群能更好的协调在一起工作,互相合作又互不影响,发挥出最大的效能。

全球首发:R20-60 Scara复合移动机器人
R20-60为移动机器人平台组合Scara机器人的复合型移动机器人,最大支持6kg货物的高效率、高精度搬运及夹取操作;
移动机器人基于二维码、激光SLAM、里程计、惯导等多传感器融合的导航算法,实现高柔性、高精度导航定位需求,并基于末端视觉引导通过Scara末端夹爪实现货物的柔性高效夹取。


功能特性:
定位导航:采用二维码导航、激光Slam导航等融合导航技术实现精确定位;
运动控制:采用双轮差速驱动,支持前进、后退、旋转等多种运动控制模式;
电源管理:支持多等级电量阈值控制,可自由设置最低充电电量,并支持闲时充电控制;
安全防护:具备前置激光避障,接触式触边碰撞检测,急停按钮等多重安全防护措施;
人机交互:具备触摸屏,声光告警提示设备目前的运行状态;
控制方式:支持自动、手动、遥控控制;
货物上下料搬运:支持最大负载6Kg物料定位抓取及搬运等操作,并提供定制化末端夹爪服务,满足多种尺寸类型物料的应用;
定位导引:支持2D、3D视觉定位导引,基于深度学习的视觉算法响应不同类型物料的高精度柔性抓取;
网络通讯:Wifi网络通讯和无缝漫游,支持5G网络扩展;
应用行业:
电商、3C电子、烟草、医药等物料的自动抓取上下料及搬运;
目前该新型复合机器人产品已应用于3C行业客户现场,实现pcb板的自动上下料,项目采用激光及二维码融合导航定位技术实现AGV的停车位置精度<5mm,实现AGV的高精度停车位置精度;通过视觉引导技术满足上下料1m的需求。自动上下料及与机台对接成品及毛坏物料的移载均通过复合移动机器人实现,项目实施运行完全替代了人力流程作业,解放人力支出,有效集成人力成本。