
常见的3D深度相机,根据工作原理的不同,分为ToF、结构光、双目视觉几类。它们的工作原理和特性如何,如何才能挑选到机器人最合适的传感器,这篇文章让你一探究竟。
3D深度相机工作原理
1. 双目视觉相机工作原理
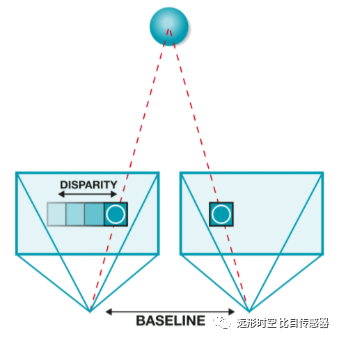
双目视觉相机借鉴了人类双眼的原理。它使用并排的,光轴平行的两台相机来观测物体并感知被观测到物体的深度信息。两台相机之间的距离是固定的,而两台相机光学中心之间的距离称为基线距离。两台相机分别从不同的角度拍摄到被观测物体。被观测物体距离相机越近,其在两台相机上拍摄到的两幅图像中的相对位置变化就越明显。这种相对的位置变化被称为视差。根据两台相机拍摄产生的视差信息,就可以通过算法计算生成深度图。对于被观测物体的照明,则有被动和主动两种方式。被动方式使用外界环境光线包括普通日常人造光源来进行照明以便于成像。而主动方式则是在相机的拍摄视野范围内使用发光元件发射随机的图案打到待观测物体表面,从而大大增加物体表面上便于用来识别和生成深度图的纹理信息。一般地,多使用可生成伪随机图案的激光器,也可使用结构光。双目视觉方式的优点包括对外界光线剧烈变化的鲁棒性,以及多台设备之间互相完全不会发生影响和干扰。双目深度相机的成本根据检测范围、距离和要求的精度不同而变化。
1. 结构光3D相机工作原理
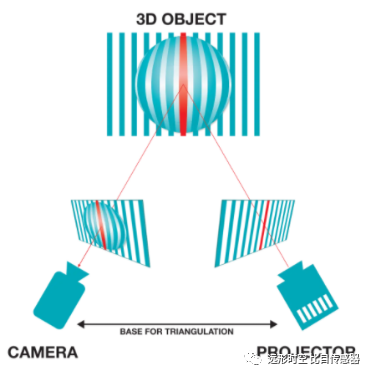
结构光的工作方式是用投影机将特定的光学图案投射到视野中待观测物体的表面,然后使用相机进行拍摄,从而获知3D深度信息。常用的光学图案有点状图案、条纹状图案、或者具有色彩编码的光学图案,有时也使用随时间变化的图案。相机和投影机被固定连接在一起,因此相机相对于投影机的位置和角度是固定不变的。因此,相机拍摄到的是投射出的光学图案打到待观测物体表面而形成的变形后的状态。通过计算投射出的原始图案和拍摄到的实际图案之间的差异,即可重建相机视场中的3D深度信息,并输出深度图像。结构光方式对于透明物体,高反光率的表面,以及大范围视场的效果不够理想。另外这种方式的劣势还包括:当多台设备的探测视场在同一个区域内出现重叠,或者外界环境光、其他光源和投影机打光的波长相同的时候,会造成明显的干扰而导致性能恶化。结构光方式的优势则是在较小的工作范围下,可以通过相对有限的成本得到较高的精度。
1. ToF深度相机工作原理
ToF(Time of Flight)的工作方式是通过测量光经过一个特定距离所用的时间来计算出距离。ToF相机上分别有光发射器和接收器,由于光速是已知且固定不变的,光从发射器到待观测物体表面再到接收器的时间和此段距离成正比,即可通过测量出所经历时间而计算出距离。ToF所使用的光发射器大多是红外光LED或者激光器。
和结构光方式类似,当多台ToF相机的探测视场在同一个区域内出现重叠,或者外界环境光、其他光源和ToF的光波波长相同的时候,会造成明显的干扰而导致性能恶化。因此,当使用多台ToF相机时,需要通过相机之间的同步控制来解决这个问题。总体来说,ToF工作方式的优势是较高的精度,不依赖外部光源,以及对于表面缺乏纹理的被测物体也能获得深度信息。
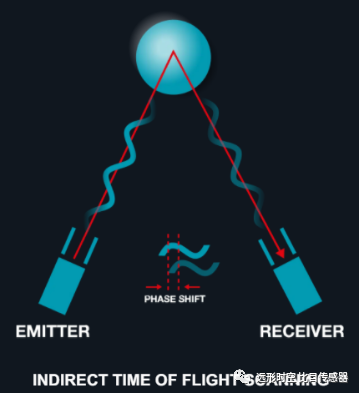
ToF又可分为dToF和iToF两种:
dToF(Direct Time of Flight)是指发射器发出单个的光脉冲,通过测量从发出脉冲到接受到从被测物体表面反射回来的光脉冲信号所经历的时间来计算出距离。
iToF(Indirect Time of Flight)的光发射器发出连续的经过调制的光信号,测距依据的是发出的光和接受到的反射光之间的相位差。

►►►
三种工作原理深度相机的对比:
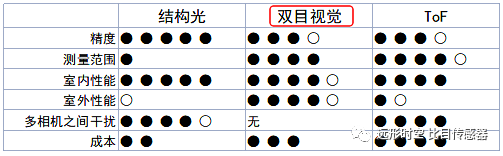
综合到移动机器人在非结构化场景中的应用,对照上表的性能对比可以看到主动双目深度相机无疑是最好的选择。首先双目原理兼顾了室内室外场景,避免了多机的干扰,对于环境具有最高的适应性;同时在测量范围和测量精度上也具有非常好的性能兼顾;最后双目系统可以非常好地平衡成本,做到价格可控。
远形时空科技推出的比目OS30A、OS20A深度相机模组是专为移动机器人避障设计,采用了双目+结构光3D成像技术,搭配专用深度计算芯片并针对机器人避障应用场景进行了专门优化。
是目前市面上为数不多可以替代Intel RealSense D435的极具性价比的产品。
●超低功耗,仅有不到1.5W
●防水设计,无惧恶劣环境
● 高达80度的水平FOV
●集成设计
● 耐高低温
●防震
●支持多平台

BIMU-OS30A/BIMU-OS20A已经处于量产状态,并通过多项第三方可靠性测试和认证。





